理学療法士・作業療法士・言語聴覚士が集うリハビリ情報サイト
PT-OT-ST.NET
トピックス
2026.03.03
「ツボ」認識AI理学療法ロボット、中国研究チームが開発
中国・瀋陽工業大学の研究チームは、背中のツボを高精度で自動認識できる理学療法ロボットシステムを開発しました。90.2%の再現率と約5.78mmの検出誤差を実現し、リアルタイムで異なる姿勢にも対応できることが実証され、この成果は、2025年11月24日に国際学術誌「Frontiers in Neurorobotics」に掲載されました。
中国では、伝統医学とロボット技術の融合が積極的に進められています。本研究で用いられているAI画像認識技術は、姿勢分析や動作解析など、理学療法の他の領域への応用も期待できる先進的な取り組みとして注目されます。
背中のツボ認識の難しさ、2段階認識システムで克服
高齢化社会の進展に伴い、理学療法サービスの需要が増加している一方で、セラピストの不足や費用の高さが深刻な課題となっています。理学療法ロボットは、こうした問題を解決する有望な手段として注目されています。なかでも、正確なツボの認識は理学療法ロボットの効果を左右する重要な要素となっています。手や耳のツボ認識については多くの研究がなされてきましたが、背中のツボ認識は明確な外部特徴が少ないため、正確な位置特定が困難とされてきました。
研究チームは、この課題を解決するため、2段階のツボ認識手法を設計しました。
まず、AI画像認識技術を使用して画像から有効な背中の範囲を抽出し、次に別のAI技術を用いてツボの座標を推定しました。第2段階では、ツボの位置を「ピクセル単位よりも細かいレベル」で特定できる技術を採用しました。
従来は「この位置にツボがある」という予測をしていましたが、新しい手法では画像を細かく分割し、「X軸のどこか、Y軸のどこか」を分類する問題に置き換えることで、検出速度と精度を大幅に向上させています。
また、画像の異なる階層から得られた特徴を組み合わせることで、より正確なツボ認識を実現しました。
100名のデータで学習、誤差5.78mmの高精度を実現
研究では100名のボランティアを募集し、専門の中医学専門家がツボの位置を特定して丸いラベルで印をつけました。その後、複数の角度から画像を撮影し、ソフトウェアでラベルの中心位置を記録しました。ここで重要なのは、AIに学習させるためには「ラベルのない自然な背中の画像」と「ツボの正確な位置データ」の両方が必要だということです。
ラベルが写ったままだと、AIが「ラベルを探すAI」になってしまいます。そこで、位置情報を記録した後、改良された画像処理アルゴリズムを使用してラベルを除去し、自然な背中の画像を復元しました。
このデータを使ってAIを学習させた結果、約90%の精度でツボを認識でき、誤差は約5.78mmという高精度を実現しました。
また、患者が体を動かして異なる背中の姿勢になっても正確に認識でき、1秒間に30回の認識処理が可能なため、リアルタイムでの追従が実現されています。
さらに、このシステムは背中の35個のツボ(背骨の中央に6個、左右に各14個)を認識できるように設計されています。
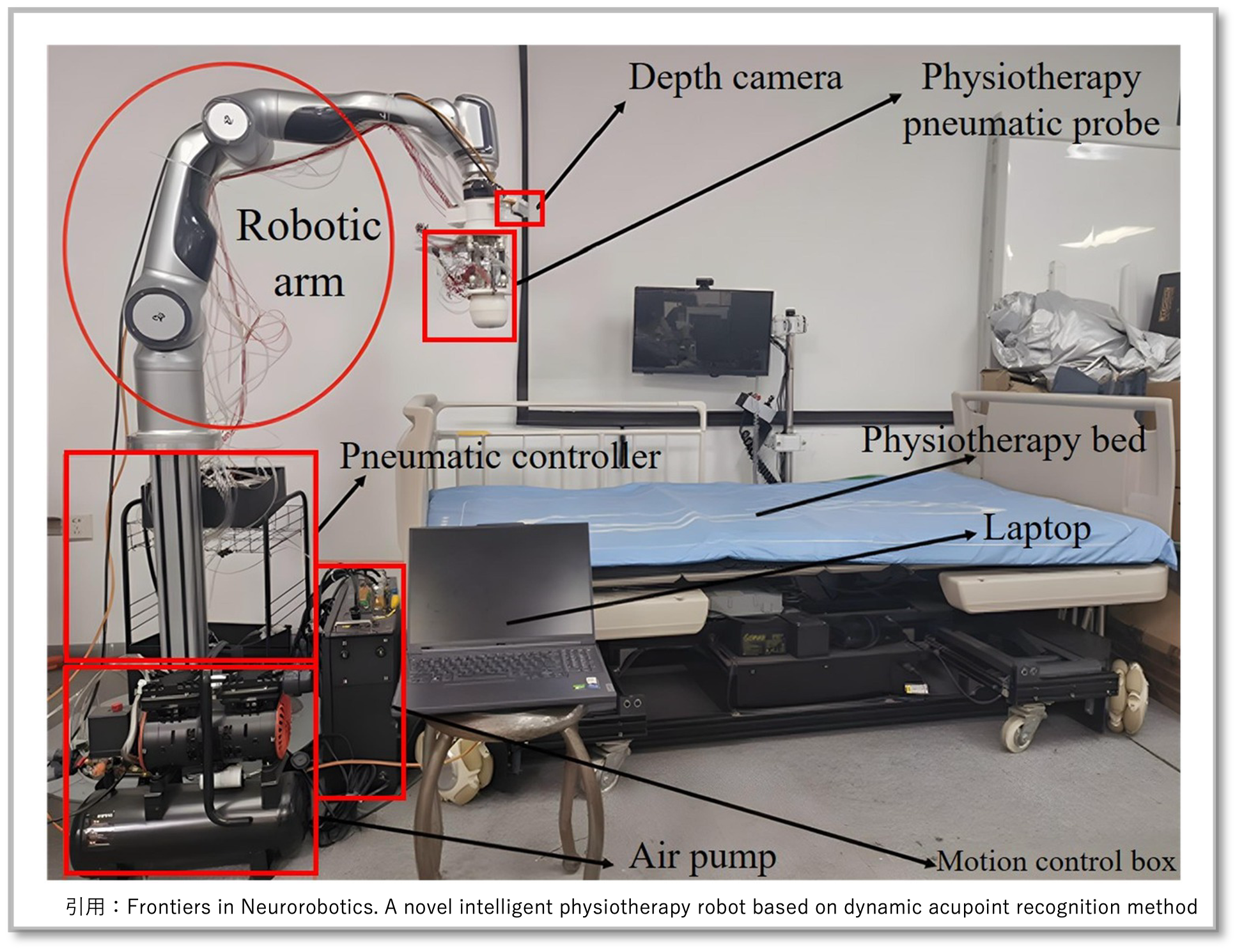
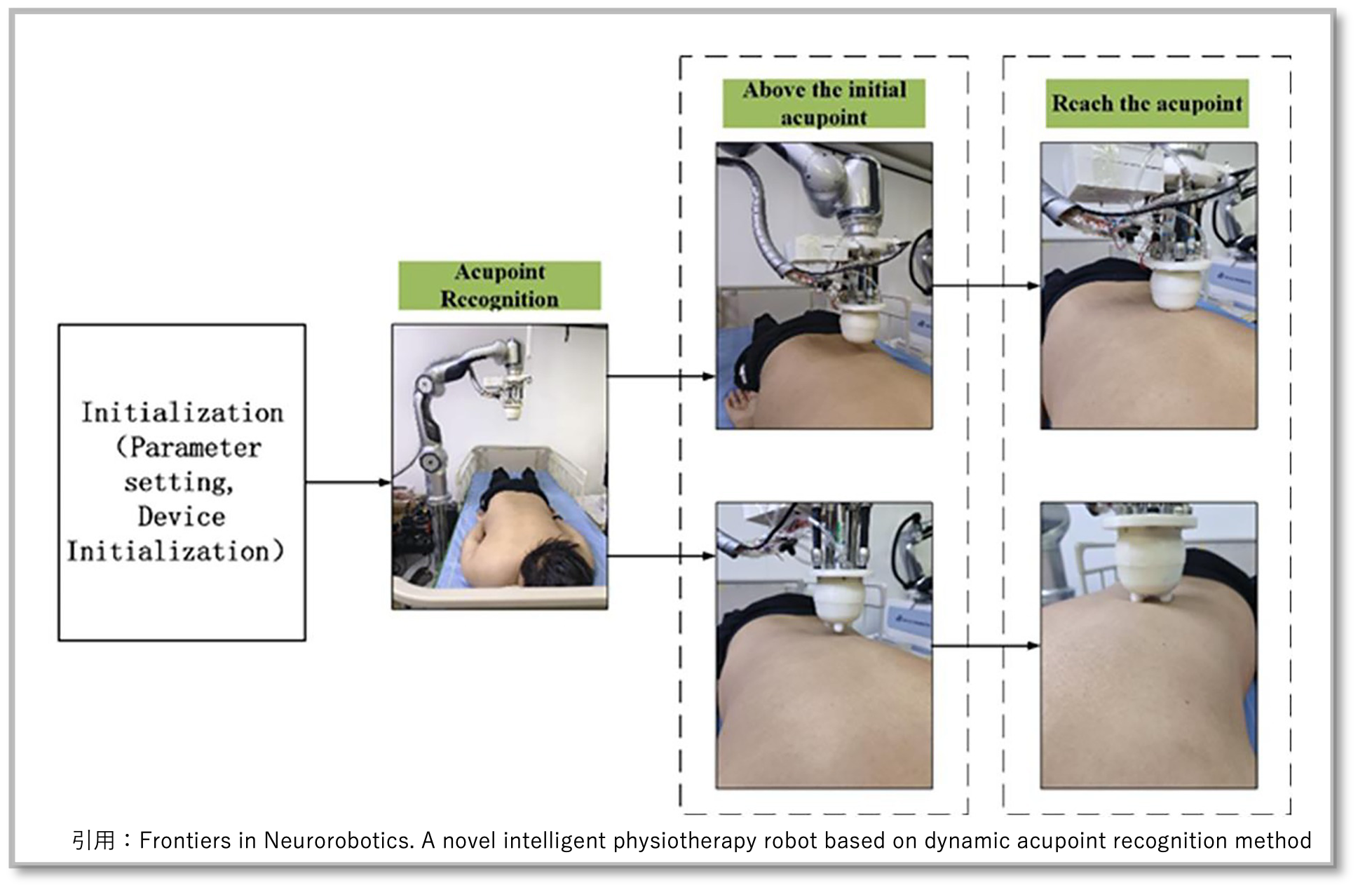
実証実験では、ロボットアームがカメラで背中を撮影してツボの位置を認識し、その後、認識したツボの位置まで自動で移動して施術を行うことに成功しました。
AI技術の応用可能性 ─ 今後の展開
筆者らは、「本研究の実験結果は、理学療法ロボットによる自律的なツボ認識の精度と信頼性を向上させる上で、この手法が大きな利点と幅広い応用可能性を持つことを実証しています」と述べています。今後は、他の知覚方法を導入してマルチモーダル融合認識システムを構築し、複雑な臨床シナリオにおけるモデルの適応性と精度を向上させる予定です。
また、研究範囲を背中から腹部や耳などの他の身体部位に拡大し、全身のツボの高品質データベースを段階的に構築していく計画としています。
本研究で用いられている高精度な位置認識技術は、伝統的な中国医学に基づくツボの特定だけでなく、姿勢評価、動作分析、患者の身体特徴点の自動認識など、理学療法の様々な場面での応用可能性があると考えられます。
高齢化社会における医療・介護の自動化、効率化に向けて、AI技術の発展が期待されます。
■ 論文情報
【掲載誌】Frontiers in Neurorobotics【論文タイトル】A novel intelligent physiotherapy robot based on dynamic acupoint recognition method
【著者】Yuhan Zhang, Shiyang Sun, Donghui Zhao, Junyou Yang, Shuoyu Wang
【DOI】10.3389/fnbot.2025.1696824
引用・参考
■ Zhang Y, Sun S, Zhao D, Yang J, Wang S. A novel intelligent physiotherapy robot based on dynamic acupoint recognition method. Front Neurorobot. 2025;19:1696824. doi:10.3389/fnbot.2025.1696824

人気記事
- 令和6年度介護報酬改定に関するQ&A(Vol.18)|厚労省
- 【国会質疑】地域包括支援センターのリハ職配置、基本指針に明記も「人員配置基準そのものの見直しには至っていない」ー 衆院厚労委
- 【診療報酬改定】リハビリ実施計画書の説明・署名ルールが見直し― 医師説明・患者署名から「多職種説明・記録確認」へ
- 「介護職員等処遇改善加算の運用ルール(案)」厚労省が通知【令和8年度改定】
- 【速報】令和8年度(2026年度)診療報酬改定の告示、説明資料・動画が公開|厚労省
- 【厚労省】介護分野の賃上げ・職場環境改善支援事業「Q&A(第1版)」公開
- 世界理学療法士連盟、奈良勲氏を追悼
- 【厚労省】「令和7年度 医療機関等賃上げ」 特設ページ公開、PT協会が要件確認・申請など周知
- 【PT協会】World Physiotherapy Congress 2025「国際会議誘致・開催貢献賞」を受賞
- 脳卒中と循環器病克服「第三次5ヵ年計画」公開 ー 切れ目ない診療・リハビリテーション、遠隔診療・医療DX積極活用
- 令和6年度介護報酬改定に関するQ&A(Vol.18)|厚労省
- 【国会質疑】地域包括支援センターのリハ職配置、基本指針に明記も「人員配置基準そのものの見直しには至っていない」ー 衆院厚労委
- 【診療報酬改定】リハビリ実施計画書の説明・署名ルールが見直し― 医師説明・患者署名から「多職種説明・記録確認」へ
- 「介護職員等処遇改善加算の運用ルール(案)」厚労省が通知【令和8年度改定】
- 【速報】令和8年度(2026年度)診療報酬改定の告示、説明資料・動画が公開|厚労省
- 【厚労省】介護分野の賃上げ・職場環境改善支援事業「Q&A(第1版)」公開
- 世界理学療法士連盟、奈良勲氏を追悼
- 【厚労省】「令和7年度 医療機関等賃上げ」 特設ページ公開、PT協会が要件確認・申請など周知
- 【PT協会】World Physiotherapy Congress 2025「国際会議誘致・開催貢献賞」を受賞
- 脳卒中と循環器病克服「第三次5ヵ年計画」公開 ー 切れ目ない診療・リハビリテーション、遠隔診療・医療DX積極活用
- もっと見る 省略する
情報提供
皆様からリハビテーションに関する情報を広く募集しております。こちらよりお寄せください。
この記事を見た人はこんな記事も見ています
-
2026.06.10

リハビリサマリー作成にAI導入 作業時間57%削減も、8割にエラー
-
2020.12.03
ロボットスーツで新たな可能性、やりたいことを実現するKeeogo
-
2023.01.23
脳卒中患者に対するロボット歩行トレーニングは本当に効果的なのか? ~ 最近のシステマティックレビュー論文の紹介 ~
-
2024.09.24
AI遠隔リハビリの介入効果、 サルコペニア高齢者を対象にRCTで検証 | BMC Geriatrics
-
2026.07.03
リハビリ業界向け、ソニー系AI「RenaX」発表
-
2026.07.10
【調査レポート】リハ現場の生成AI利用率が大きく上昇 「試す」から「日常利用」へ ─ 2026年リハ職AI活用アンケート
あなたは医療関係者ですか?
ページ上部へ戻る